AMDを用いた質点系の振動制御
RESPチームでは以前からAMDを用いた振動制御について取り組んでいます。
その内容を何回かに分けてご紹介したいと思います。
最終的にはAMDを使った制御系の設計が可能となることを目的としていますが、今回は導入部分として、状態フィードバック制御のイメージと、制御系設計の準備段階として低次元モデルについて説明します。
AMDを使った振動制御に関しては以前の記事も参考にしてください。
制御のイメージ
制御というとどういうものを思い浮かべるでしょうか。
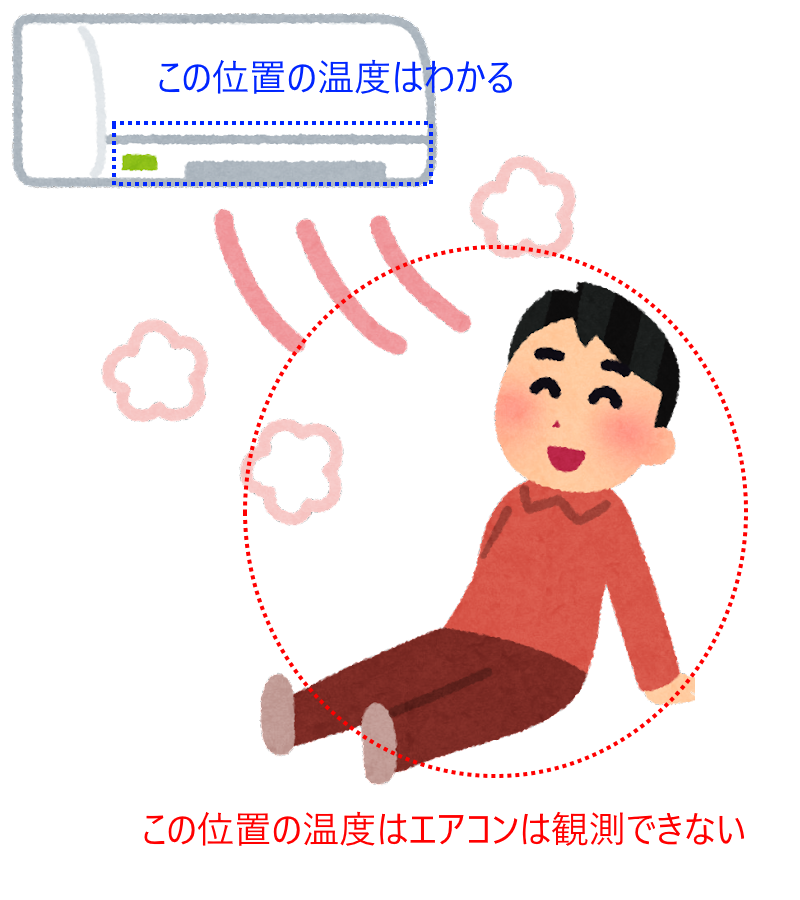
身近な例で、エアコンで部屋の温度をコントロールする事を想像してみてください。
まず、リモコンで希望する温度(目標値)を設定します。そして、センサーで温度を測ります(状態観測)。希望する温度と実際の部屋の温度の差(偏差)から設定温度に近づけるために風を送り込みます(制御入力)。設定した温度に近づいたら停止して、離れたらまた動作するという動きを繰り返しながら部屋の温度がコントロールされます。
このように、制御対象の状態を観測して、目標値と差がある場合はそれに近づくように制御量を入力する事を状態フィードバック制御と呼びます。

状態観測について
ここで、部屋全体の温度をコントロールすることを考えます。温度を測ることができるのはエアコンのセンサーの位置のみなので、それ以外の空間の温度を知ることはできません。例えば、部屋の中で人がいる場所の温度をエアコンは観測できません。
この状態では、風を送り込んだとしてもセンサー位置以外の空間の温度がどうなっているかわからないので、人がいる場所の温度コントロールができているかを判断できません。
仮に、遠隔センサーのようなものを設置したとしても、どうしても部屋の中では観測しきれない領域は出てしまいます。全てを調べようとすると部屋中センサーまみれになってしまいます。
状態フィードバック制御は制御対象の状態全てを観測する必要があり、一般的に簡単な事ではありません。
そのような時に、観測できない領域については状態を推定するという手法があります。このシステムを状態観測器(オブザーバ)といいます。
しかし、今回は別の方法を考えます。
※想像上のエアコンです。
部屋全体の温度ではなく、人がいる領域のみの温度がコントロールできればよいと考えてみます(上図の赤枠付近)。
人がいない場所の温度は無視します。
そうすれば、センサーは人がいる場所のみに配置して、他の空間の温度を推定せずに済みます。
もちろんこの場合、エアコンのセンサーの位置から人のいる位置までの温度がどのように伝わっていくかはモデル化することになります。
建物の制御を考えてみる
今までの話を建物で考えます。
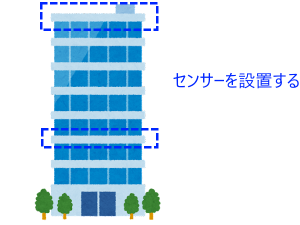
質点系の解析を考えたときに、すべての層にセンサーを設置するのは大変なので、応答を確認したい箇所のみにセンサーを設置して解析を行い制御が可能であるかを検証します。
全ての層を質点として考えるのではなく、センサーを設置する点のみを質点として考えることで、すべての状態を観測している事と等価とします。
ただし、むやみに自由度数を減らすのでは実現象と解析モデルに違いが生じます。
そこで、固有値解析結果を使って制御用に質点を減らしたモデルを作成します。
低次元化モデルの作成
今回は5質点系のモデルを2質点系に低次元化してみます。詳しい方法は次回に説明しますが、以下のようなモデルとなるようにしました。
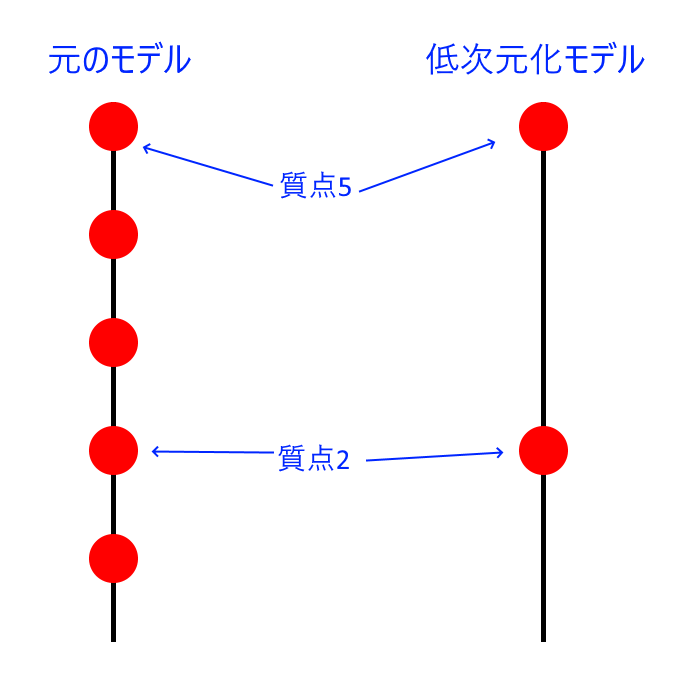
5質点系の解析モデルで最上階と、中間層にあたる2階部分のモデルに修正します。
最上階と2階部分に低次元化したのは、その2点が1次モード、2次モードの腹(そのモードの最大振幅点)となるためです。※厳密には2次モードの最大値は質点5となりますが、中間層のモード値が一番大きくなる質点2を選びました。
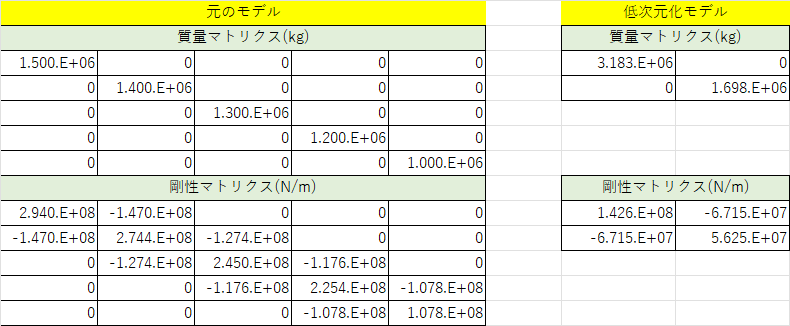
低次元化すると以下のように質量マトリクス、剛性マトリクスが変化します。
この低次元化後の剛性マトリクスのモデル化にはある工夫がしてあります。答えは次回の記事に回しますが、気づいた人はすごいです!
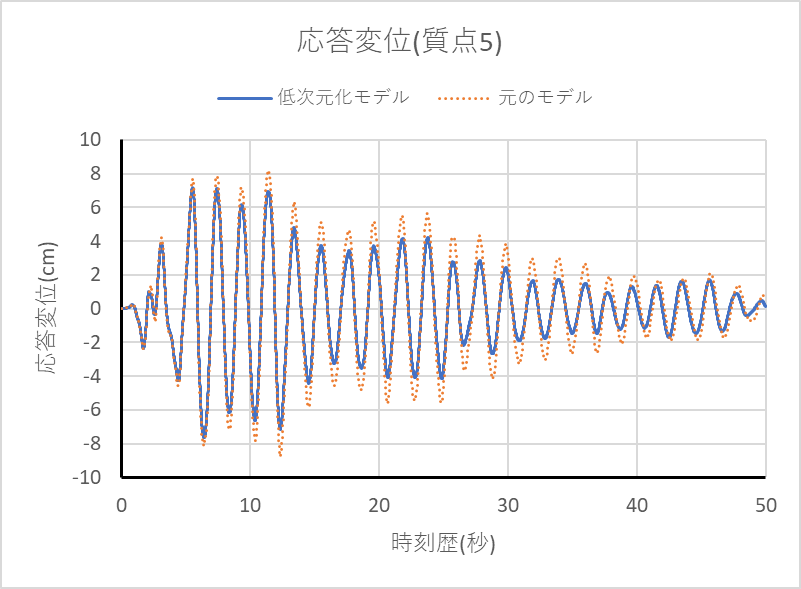
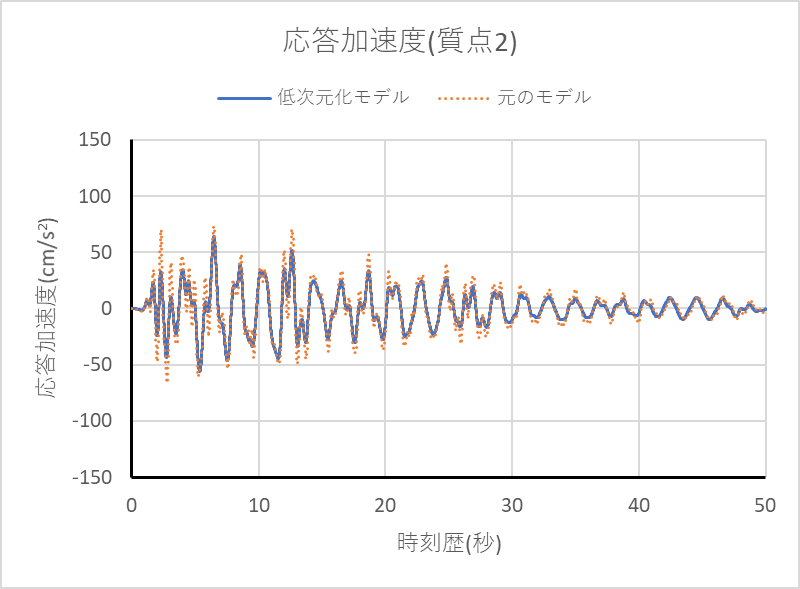
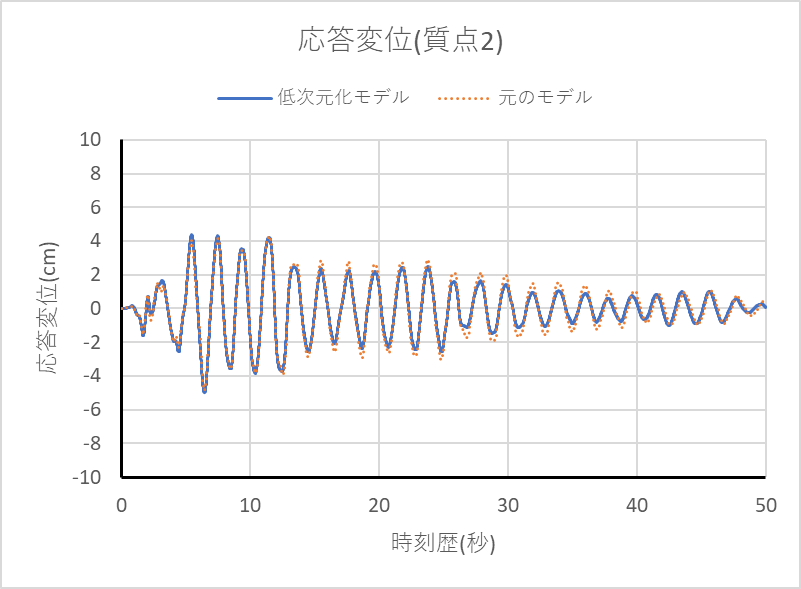
このモデルでEl Centro NSの地震波を入力した結果を比較します。
時刻歴応答で比較すると、応答加速度はピークがずれていますが、おおよその挙動は一致しています。
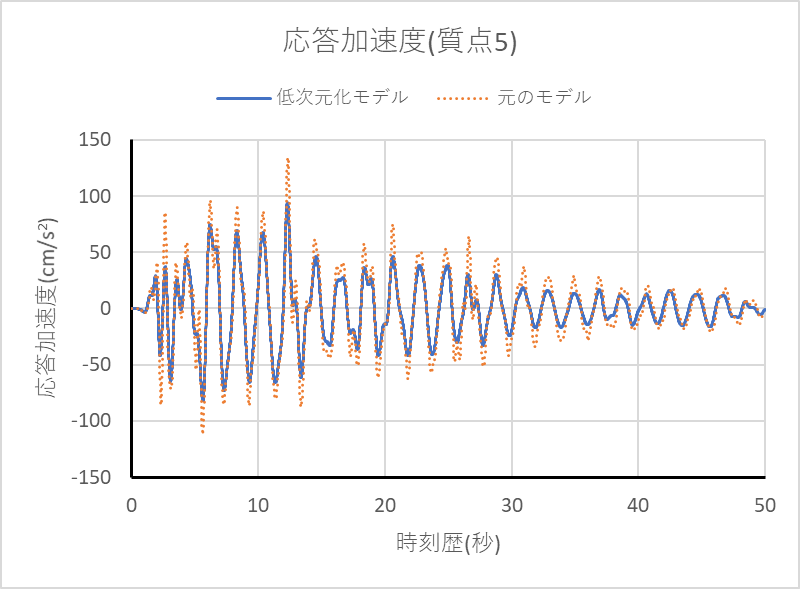
周波数毎の増幅率(応答加速度/入力加速度)で比較すると、低次元化後も2次モードまでは元のモデルの結果とよく一致しています。応答加速度のピークが一致しないのは、この3次モード以降を切り捨てている影響と考えられます。この高次モードを切り捨てた事による影響の事をスピルオーバと呼び、低次元化する点を適切に選ぶ事で回避する事ができます。
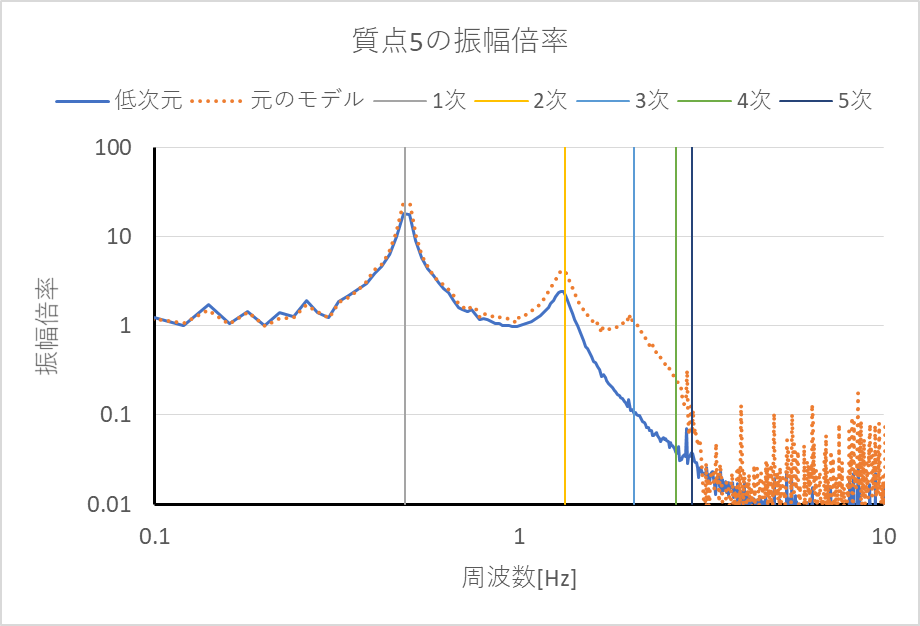
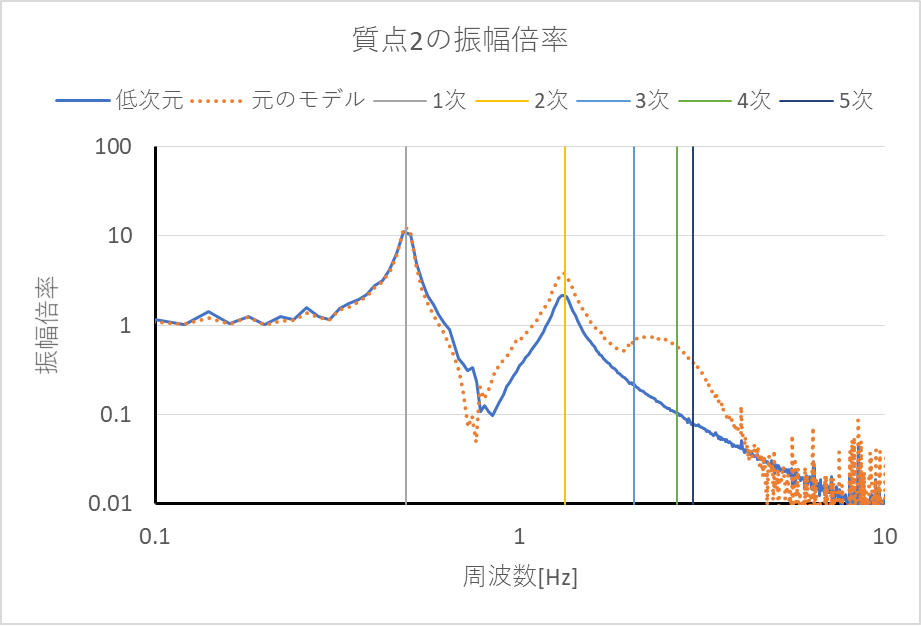
本来であれば、3次モード以降で影響がないように低次元化モデルを作成する必要があります。
今回のモデルケースではそのように設定することが難しかったですが、検証結果としてはそこまで悪くない近似ができたと思います。今後、様々なモデルでも検証していきます。
まとめ
低次元化した制御用モデルは元のモデルの応答をよく近似できるので、低次元モデルで制御ができる事を確認できれば、元のモデルでも制御が可能と言えます。低次元化したモデルであれば、数カ所にセンサーを設置することで、全状態を観測した制御設計が可能となります。
次回はこの低次元化の方法について解説します。